
FREMTIDSTRAFIK – Min første kæreste blev dræbt i en trafikulykke for øjnene af mig. Der går tre mennesker rundt i Danmark lige nu, som i næste uge er dødsstatistik. Og her regner vi slet ikke dem med, som bliver svært handicappede eller alle de pårørendes sorg og angst. Jeg har selv stadig psykiske mén over mit vidne til højresvingsulykken for 30 år siden, skriver Claus Skytte, der med fokus på trafiksikkerhed argumenterer for nul døde i trafikken med førerløse biler.
Stort set ingen danskere er døde i flyulykker de sidste mange år. Det samme gælder togulykker. Hvorfor skal der så stadig dø mennesker på vejene? Svaret er banalt: Fordi menneskene stadig kører rundt i bilerne. På trods af jern og sikkerhedsseler og airbags og advarselsskilte i vejkanten, dør mennesker stadig hele tiden på grund af bilen. Glem ulven. Det farligste dyr i Danmark er fars dyt.
Førerløse biler må være løsningen på problemet.
De er spækket med så utrolig teknologi, at de ikke kan køre galt eller ramme nogen eller noget. Det er egentlig ikke så meget en bil men mere at sammenligne med en kørende computer. En Smartphone på hjul. Rullende robotter og kunstig intelligens vil beskytte os mod os selv og forhindre daglige tragedier.
Der dør i øvrigt 1,4 millioner mennesker i verdenstrafikken hvert år. Det er 3000 mennesker om dagen. Så det er ikke bare et dansk fænomen.
Det handler om at se det mulige i det umulige
Det forekommer ganske svært at finde vej igennem en by med alle dens ensrettede veje og vejarbejde. Det var derfor allerede klart i 2004, at kompleksiteten i sådanne manøvrer ville gøre en førerløs bil aldeles håbløs at opfinde. Her 14 år senere kører den rundt i byernes snørklede gader. Langt væk fra Danmark.
Det tog blot 13 år, fra teknologien var moden, til hestevognene praktisk talt var fjernet fra New Yorks gader. Med et klippetiklop red de ud mod solnedgangen for aldrig mere at vende tilbage
Googles Waymo har kørt over otte millioner kilometer. Det er 200 gange rundt om Jorden, og den har ikke haft andre ulykker, end når forvirrede mennesker i deres biler har kørt ind i den. Heldigvis uden personskade.
Det tog os bare fire år at udskifte vores klaptelefoner med smartphones. Uden at vi egentlig registrerede det. Hvor hurtigt går det med smartphones på hjul?
I år 1900 var 1 ud af 1000 køretøjer på Times Square en bil. 13 år efter var bil-teknologien så moden, at hestevognene praktisk talt var fjernet fra New Yorks gader. Med et klippetiklop red de ud mod solnedgangen for aldrig mere at vende tilbage.

Vejdirektoratet i Danmark fortæller i vores nationale transporthistorie, at Roskildevej var den mest befærdede vej i 1921. Dengang skramlede 329 hestevogne og 326 biler dagligt forbi Damhuskroen. Kun fire år senere var trafikken helt oppe på 1367 biler om dagen, mens der var uro blandt hestespandene.
Hvis vi skal sammenligne udviklingen i USA og Danmark, går det hurtigere derovre og langsommere her. Hestevognen var helt ude af billedet i Danmark i 1954. Det tog noget ekstra tid, fordi vi en overgang fik brug for noget at køre varer på under Anden Verdenskrig.
Så lad os prøve med noget arkæologisk tid: Trækker vi 1921 fra 1954 og korrigerer for verdenskrigen, foregik udviklingen lidt over dobbelt så langsomt i Danmark som i Amerika.
Waymo har lige bestilt 20.000 elektriske, førerløse biler fra Jaguar. De er lokkende på gaderne i 2020. Google begyndte at teste Waymo tilbage i 2009. Så kan vi deraf slutte, at førerløse biler i Danmark vil være normen på de danske gader i 2030? Om 12 år.
Pessimisterne tror som sædvanlig ikke på optimisterne
Designtænkeren Jesper Wille er nok den person, som bruger mest tid på at tilbagevise mine vilde idéer om, at en flåde af førerløse biler skulle dukke op i Danmarks gader allerede om 3-4 år. Det tror han simpelthen ikke på er muligt. Et totalt forbud mod at køre bil ser han som ligge længere ude i fremtiden end 30 år.
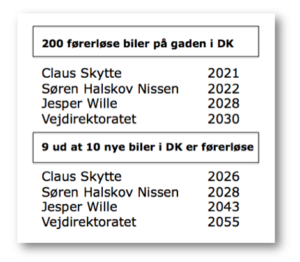
Jeg siger 3 år, og Wille siger 10 år, før vi kan tage første skridt mod at udfase dødeligheden på vejene. Og hvor jeg håber på, at der ikke længere er dødsulykker i trafikken om otte år, mener Wille, at vi skal tælle dødsannoncer frem til 2038
Wille tror, at zoneforbud måske kunne opstå før. Men han tror ikke på, at en decideret flåde af 200 førerløse biler kører rundt i Danmark før om 10 år. Og da vil den i Willes øjne være under skarp kontrol og kun køre på forsøgsbasis med en fysisk mand ved den røde stopknap.
Derfra og hen til en meningsfuld udskiftning af almindelige biler med førerløse robotter, mener Wille, at der vil gå yderligere 10-20 år. Forudsat at alt går vel, og det gør det ikke altid, som han pointerer. Han husker os også på, at en gennemsnitlig helt almindelig bil lever væsentligt længere end ti år – og at meget langt fra alle mennesker har råd til at skifte den ud.
Ikke engang hvis det er en delt bil; en vogn der kører førerløst rundt og samler folk op og sætter dem af igen. Det vil stadig være for dyrt ikke at anskaffe sig – om ikke andet så en gammel smadderkasse med rat og benzinmotor.
Wille tror heller ikke på, at børnefamilierne kan undvære deres egen bil. Så jeg siger 3 år, og Wille siger 10 år, før vi kan tage første skridt mod at udfase dødeligheden på vejene. Og hvor jeg håber på, at der ikke længere er dødsulykker i trafikken om otte år, mener Wille, at vi skal tælle dødsannoncer frem til 2038.
Helt grundlæggende er Willes vurdering, at jeg overvurderer, hvad den kommende teknologi er i stand til. Vi burde for eksempel alle gå med virtual reality briller på lige nu, men gør det ikke, driller han. Vi undervurderer kort sagt, hvor lang tid ting tager.
Wille eksemplificerer, at det nærmest er uhørt at designe så meget som en termokande på mindre end et år – fra skitse til færdigt produkt på butikshylden. Det kan kort sagt ikke lade sig gøre at bygge så mange førerløse biler, der skal til for at erstatte den nuværende flåde i den rasende fart, som optimisterne forestiller sig.
Førerløse biler kan blive forbudt
Wille ser også det danske lovarbejde som noget helt andet – og meget mere langsommeligt – end det markedsdrevne USA. Derovre i markedsøkonomiens land sætter man bare bilerne på vejen, indtil nogen dør. For først derefter at overveje, om der måske skulle laves en eller anden slags lov for at forhindre mere skade, anfører han.
I Danmark derimod har vi tradition for at tage stilling til legalitet med det samme. Så ting er ulovlige til de bliver lovlige. I hvert fald hvis der er nogenlunde rimelig grund til at tro, at noget kan gå grueligt galt. Det tog over tre år at få gjort Segway-kørsel lovlig i Danmark, skriver Wille i min feed, og trumfer med, at Segwayen trods alt bare en el-knallert, der står på højkant.
Ét er et spil som Jeopardy og Go. Uanset hvor komplekse de spil er. Noget helt andet er at foretage et højresving fredag eftermiddag på et tætbefærdet vej i en storby med milliarder af gange større muligheder og sandsynligheder for ulykker, end selv verdens mest komplicerede algoritme kan overskue
Jesper Wille tror kort sagt ikke rigtig på en trafikrevolution inden for en overskuelig fremtid. Vejdirektoratet er faktisk endnu mere skeptisk. De førerløse biler overtager ikke vejene før hele 47 år ude i fremtiden, hedder det. Med andre ord først fire år før jeg fylder 100 år. Så vi kan forsat ikke være trygge i trafikken. Over 8000 danskere skal dræbes på landevejene, før det aldrig mere sker igen. Jeg nægter at tro det.
Hvordan kan en bil se, hvad der sker på vejen?
Søren Halskov Nissen er, heldigvis for mig, lodret uenig med både Jesper Wille og Vejdirektoratet. Så ham har jeg drukket kaffe med – og en øl om fredagen på Klub i København, hvor vi begge huserer.
Nissen arbejder lige nu hos svenske Qamcom research & technology, der blandt andet hjælper med at udvikle selvkørende systemer til selskaber som Volvo (Ubers førerløse flåde), samt har ders egen udvikling af radarer og kunstig intelligens til førerløse biler.
Om nogle få måneder starter han som Head of Product Autonomous Mobility hos én af verdens førende producenter af førerløse biler. Jeg kan rigtig godt lide Jesper Wille, men det er mere spændende at tale med Søren Halskov Nissen.
Hvad der var umuligt for mennesket i 2004, blev en realitet otte år senere. Computerne lærte at læse billeder og dermed i princippet kigge ud af frontruden for os. Vi kunne skrive regler for computerne før den tid, men nu kunne vi også, med hjælp fra Skyen, give computerne eksempler på, hvad den skulle lære, og f.eks. lade dem spille spil imod sig selv så mange milliarder gange, at den kendte alle mulighederne for at vinde og tabe.
Når maskinen så oven i købet fik spillereglerne at kende, kunne den gennemskue alle muligheder og sandsynligheder i et splitsekund og vinde over mennesket.
Men ét er et spil som Jeopardy og Go. Uanset hvor komplekse de spil er. Noget helt andet er at foretage et højresving fredag eftermiddag på et tætbefærdet vej i en storby med milliarder af gange større muligheder og sandsynligheder for ulykker, end selv verdens mest komplicerede algoritme kan overskue. Det er fysisk virkelighed, med uendeligt mange muligheder.
Man kunne få en computer til at handle alt fra aktier til at spille skak. Men at forstå og manøvrere i en menneskelig virkelighed var en helt anden sag
Så opgaven med genkendelsen af billeder blev crowdsourcet på Stanford University fra omkring 2010. Den almindelige maskinlæring kunne ikke tygge sig meningsfuldt igennem al den data, der var til rådighed, når man kigger ud af ruden.
Men gennembruddet kom alligevel i 2012, hvor algoritmen omsider blev skrevet. Det sæt af regler, der kunne finde mening i den meningsløse verden, som lastbilchauffører og unge mennesker med spritnyt kørekort færdes i til daglig. En vejviser til at kunne genkende. Som kunne se forskel.
En algoritme er at sammenligne med en kageopskrift: Hvordan 3 æg, 2 dl sukker, 3 bananer, 2 tsk bagepulver, 1 tsk vaniljesukker, 1 knsp salt, 125 g hvedemel og 50 g mørk chokolade kan blive til en banankage. Algoritmen kommer i softwareprogrammet, som bager kagen.

Opskriften på en maskine, der kunne se og forstå, hvordan den skal reagere på det, har holdt computeringeniører søvnløse gennem mange år.
Man kunne få en computer til at handle alt fra aktier til at spille skak. Men at forstå og manøvrere i en menneskelig virkelighed var en helt anden sag.
Det var umuligt for computeren at bygge en database for at kunne lagre og forstå hver eneste pixel i et uendeligt rum. Den havde meget kort tid til at vurdere, hvad der skulle gøres. Den skulle kigge på billeders pixels og i et splitsekund afgøre, hvad det var. Og med det levende billede i en levende trafik blev det bare endnu mere sofistikeret:
Hvad var tingene på filmen? Og hvad ville objekterne med stor sandsynlighed gøre lige om lidt? Og hvordan skal jeg som stakkels computer reagere på det uden at skabe total kaos? Gudskelov får maskiner ikke stress.
Den brugte ikke videre meget tænketid ikke på det, man normalt forbinder med en bil: ”Drej på rattet, træd på sømmet min ven”, som Leif Sylvester synger i ”Tryk på knappen Kurt” med Eva Madsen.
Det ville have været umuligt at skrive til en computer, hvordan en hund ser ud. Som at beskrive en dåseåbner for et menneske, som aldrig havde set dåsemad. Men maskinen kunne se billeder af en hund så mange gange, at den vidste hvad ”hund” var. Herefter kunne den tage sine forholdsregler, når den mødte en hund
Man kunne nemlig sagtens bygge en førerløs bil for tyve år siden. Der kunne køre af sig selv. Men den sidste puslebrik manglede, for at bilen skulle kunne køre ud på egne veje selv. Den skulle kunne skelne en cykel fra en motorcykel. Se forskel på et lysglimt og en bro. Skelne mellem på en olieklat og en skygge. Læse et skilt og forstå det samme skilt, som var overmalet med graffiti. Den skulle kunne se forskel på et barn og en kilometersten.
Når den kunstige intelligens først kunne genkende et træ, så vidste den nok, at træet ikke rørte sig ud af flækken, på samme måde som den vidste, at et menneske kan bevæge sig i alle mulige retninger. Den havde ikke opnået sin viden, ved at mennesket havde fortalt maskinen, hvordan mennesker bevæger sig, eller hvordan træer står stille. Den havde set billeder af det så mange milliarder gange, at den selv havde gjort sig erfaringerne.
Maskinerne skal selv lære, hvordan de ser sig for i trafikken
Det ville have været umuligt at skrive til en computer, hvordan en hund ser ud. Som at beskrive en dåseåbner for et menneske, som aldrig havde set dåsemad. Men maskinen kunne se billeder af en hund så mange gange, at den vidste hvad ”hund” var. Herefter kunne den tage sine forholdsregler, når den mødte en hund.
Ligesom mennesket bliver bilen bedre til at køre sikkert, jo bedre erfaring den får. Men til forskel fra mennesker, kan computerne med det samme give al deres mindste viden videre til alle de andre kolleger, som straks retter ind efter det og aldrig glemmer forbedringen igen.
Ikke engang ét dødsfald ud af mange tusinde var tilladeligt. Maskinen måtte aldrig nogensinde tage fejl. Det var udfordringen
Så det svære var dermed ikke at få computeren til at finde vej eller svinge eller at trille bilen ned ad gaden. Det komplicerede var, at denne skulle vide, hvad den så og aldrig tage fejl af det.
Man kunne få succes med at få en computer til at vinde et spil Go tre ud af fire gange, men det er absolut ikke godt nok, at en førerløs bil kun rammer en fodgænger en ud af fire gange. Ikke engang ét dødsfald ud af mange tusinde var tilladeligt. Maskinen måtte aldrig nogensinde tage fejl. Det var udfordringen.
Derfor holdt alle også vejret, da en førerløs Uber-bil under prøvekørsel kørte en cyklist ned og dræbte hende på stedet.
Men det viste sig hurtigt, at det ikke var computeren, der tog fejl. Der var slukket for computeren, fordi test-chaufføren var ved at afprøve et nyt system. Eller måske var det en softwarefejl, som gjorde, at computeren ikke kunne få adgang til den data, som den skulle bruge.
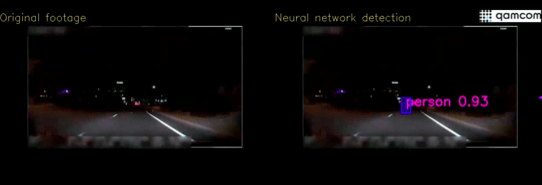
Men det handlede i hvert fald ikke om, at computeren ikke kunne se cyklisten. Når billederne af ulykken blev kørt igennem Qamcoms computer – endda i en meget dårligere billedkvalitet – kunne computeren allerede se cyklisten længe før det menneskelige øje. Så den kunne sagtens have nået at bremse eller undvige.
Det var ikke computeren, der var noget i vejen med. Uber påstår, at det var en konfigurering af systemet der var forkert. Så det var sikkerhedschaufførens skyld. Det var i øvrigt en kvinde, men det skal vi ikke lave perfide vittigheder om.
Kan du spotte cyklisten på billedet til venstre? Det kan Qamcom’s neurale netværk.
Data er de førerløse bilers benzin
Neurale netværk har eksisteret siden 50’erne. Men de har ikke haft nok computerkraft eller data at arbejde med. Dataen er så at sige mel og sukker og æg, mens algoritmen som sagt er opskriften.
Derfor havde man frem til 2012 fokuseret på den opskriftsbaserede computer, fordi det gav mere mening med de muligheder, der var for hånden. Man kunne arbejde på at lave en opskrift, men man kunne ikke regne ud, hvordan en maskine selv kunne skabe sin egen opskrift og få en velsmagende banankage ud af det.
Der var større sikkerhed for, at opskriften gik op og gav mening, hvis det var mennesket, der skrev den ud fra vores erfaring. Mens der ingen anelse var om, hvorvidt en maskine selv kunne lære sig selv at bage en kage uden at kende opskriften. Hvis der altså overhovedet have været ingredienser i køkkenskabet, som den kunne arbejde med. Altså data.
Stanford udskrev en konkurrence om den bedste billedmaskine i 2012, og vinderne holdt ikke deres viden for sig selv, men gav opskriften fri, så alle kunne arbejde på at forbedre den
På Stanford University havde man ikke data nok, så man skabte Imagenet, med 1.000 gange 1.000 billeder, som de studerende kunne afprøve deres opskrifter på. Så man kunne finde ud, hvis computer der var bedst til at læse billederne og forstå dem. Billederne på Imagenet var ikke katalog-billeder fritlagt på en hvid baggrund. Som ville være lettere at læse og forstå.
Billederne var komplekse med masser af baggrund og træer og huse. 1.000 billeder af en cykel i alle de mulige måder en cykel kunne befinde sig på ude i den virkelig verden på. Fra alle mulige vinkler. Sådan som verden nu engang er: Noget forbandet rod.
En million billeder var også for tunge for en computer at arbejde med. Derfor fik computeringeniørerne hjælp fra spil-industrien. De havde behov for at køre mange billeder, for at give deres brugere en lækker spiloplevelse. Til det arbejde havde de skabt en billedafviklingsmaskine, som de kalder for en Graphics Processing Unit (GPU).
Stanford udskrev en konkurrence om den bedste billedmaskine i 2012, og vinderne holdt ikke deres viden for sig selv, men gav opskriften fri, så alle kunne arbejde på at forbedre den.
Her er fire forskellige algoritmer sidestillet. I det første billede kan algoritmen se bilen, men ved ikke hvad det er. I det sidste billede, kan algoritmen ikke alene se men også forstå mere af det, som den ser på billeder.
Et billede siger mere end tusind kodelinjer
Et af de store gennembrud hed YOLO, som betyder ”You Only Look Once”, fordi billedet bliver set og analyseret på én gang. Fotoet af gaden med biler og cykler og fodgængere får lagt et digitalt gitter over sig, hvorefter algoritmen felt for felt, pixel efter pixel, sammenligner mønsteret med de milliarder af andre billeder, som den har set.
Nu kunne man omsider begynde at bygge en førerløs bil
På et splitsekund laver computeren kasser og indekserer dem som ”person”, ”bil” og ”cykel”. Computeren kunne omsider genkende et objekt ekstremt hurtigt og meget mere præcist end et menneske. Vi kunne slet ikke nå at opfatte, hvad vi så på billedet, før computeren havde indekseret det og vurderet, hvor objekterne med mest størst sandsynlighed vil bevæge sig hen i næste nu.
Nu kunne man omsider begynde at bygge en førerløs bil.
En førerløs bil består groft sagt af en skal og nogle hjul en elektrisk motor, internet, kameraer, lidarer og radarer.
Inden længe overtager kognitive løsninger arbejdet med at planlægge og styre varernes vej i logistikbranchen verden over. Computeren bevæger sig lige nu fra at have analytiske evner til at have forudsigende evner.
Den kan se længere frem i tiden end os. Den træffer valg for os baseret på dens kendskab til os. Alt hvad vi kan ønske os af en kunstig kollega, kunstig sekretær eller en kunstig privatchauffør.
Vi fik det første billede af fremtidens trafikale livsforsikring i starten af 2017. Da optagelserne fra en Tesla viste, hvordan den udsendte et advarselssignal for herefter at sætte farten ned. To sekunder før bilen foran den kom ud for en ulykke og væltede rundt et par gange. Den kunstige intelligens kunne ved hjælp af sin radar og fartmåling med lysets hast måle sig frem til, at det ville gå galt for bilen foran den. Derfor handlede den for at sikre sine passagerer.
Teknologien bliver hurtigt billigere
En radar var dyr for et år siden. Men radaren på en førerløs bil som Waymo vil i 2018 komme ned og koste omkring 3.000 kr. stykket. For fem år siden kostede den over 10.000 kr.
Radaren var sidste år på størrelse med 2 iPhones lagt oven på hinanden. Radaren i bilen redder allerede millioner af liv, og bliver endnu vigtigere fremover. Det lyder som science fiction, som når en computerchip i en hunds nakke kan få den til at vende tilbage til sit hjem, når den er stukket af.
Det går meget stærkt med udviklingen inden for førerløse biler. Der kommer virkelig gang i en opgave, når en kæmpe muskel som samtlige bilproducenter verden over fokuserer deres kraft om at nå først i mål og blive den foretrukne førerløse bil
Men det er kun fordi, app’en ikke er opfundet og derfor endnu ikke en helt normal funktion i en hundeejers hverdag. Som GPS’en bliver radarer en naturlig del af vores liv. Om ikke længe er den ikke større end et frimærke. Så kommer der radarer i alt.
Det går meget stærkt med udviklingen inden for førerløse biler. Der kommer virkelig gang i en opgave, når en kæmpe muskel som samtlige bilproducenter verden over fokuserer deres kraft om at nå først i mål og blive den foretrukne førerløse bil. Den selvkørende verdens Ford T, der vil gå ind i historien, som den førerløse vogn til masserne. Som en folkevogn uden Hitler.
Om 3-5 år er teknologien så moden, at 1 promille af alle nye biler på planeten er førerløse uden rat og speeder. Hvis vi sammenligner tallet med internettets udvikling, så var kun 1 promille af alle klodens ting og mennesker forbundet via internettet for 10 år siden. I dag er det 1 procent, som er forbundet, og internetiseringen er i voldsom stigning. Teknologisk udvikling går meget hurtigere, end vi er i stand til at fatte.
Hvis politikerne tillader det, bliver transportbranchens flåde og chauffører meget snart erstattet med kunstig intelligens. Det mener både internetbranchen og den etablerede bilindustri. På Driverless Car Market Watch, kan man læse, hvornår de forskellige administratorer mener, at nu er det nu. På artiklerne fra 2011 og frem til i dag står mindst en ting meget tydeligt frem. Optimisterne bliver mere og mere optimistiske.
Der er fem store tekniske knaster, der skal høvles ned, før førerløse biler for alvor kan være på vejene i Danmark. Men samtlige af de knaster har allerede stort momentum og vil have løst store dele af udfordringerne inden for de næste 4-5 år
Men hvor lang tid vil der gå, før vi får denne fuldstændig sikre verden, hvor vi aldrig mere skal frygte, at vores børn ikke vender hjem til eftermiddags-te og friskbagt banankage?
Søren Halskov Nissen mener, at vi godt kan sætte kagen i ovnen allerede nu.
For ham at se, er der fem store tekniske knaster, der skal høvles ned, før førerløse biler for alvor kan være på vejene i Danmark. Men samtlige af de knaster har allerede stort momentum og vil have løst store dele af udfordringerne inden for de næste 4-5 år.
Herefter vil det kun være politik og dermed lovgivning, der står i vejen for at forhindre, at førerløse biler kører rundt i Danmark. Så må politikerne tage de analoge trafikdrab på deres skuldre, til de omsider slipper den førerløse bil fri.
De førerløse biler skal have mere effektiv regnekraft
De sidste tre år er der sket en dramatisk forbedring af de neurale netværks algoritmer. Som f.eks. YOLO. I slutningen af 2017 offentliggjorde Facebook Mask R-CNN, som nu er den bedste offentligt tilgængelige algoritme til klassificering af objekter i et billede.
Men den bruger til gengæld mere regnekraft end YOLO3. Som så til gengæld ikke er lige så god til at finde og klassificere objekterne på billedet. Faktisk kræver algoritmer som Mask R-CNN så meget regnekraft, at selv de bedste computere ikke rigtig kan følge med. Det problem skal løses, men regnekraften fordobles samtidig hvert andet år, så løsningen er på nippet til at være der.
I dag kører førerløse biler rundt med det, der bedst kan sammenlignes med et stort datacenter i bagagerummet. Billederne fra bilernes kameraer bliver gennemset og fortolket ved hjælp af de grafiske acceleratorer fra computerspilbranchen.
Men i de grafiske computere bruger alt for meget energi og er alt for dyre til, at førerløse biler lige nu kan stilles til rådighed for masserne. En basisklasse førerløs bil koster i omegnen af en million kroner (uden moms og afgifter) og lever typisk fire år, hvilket er alt for kort tid.
Google forsøger at få prisen og energiforbruget ned med en TPU, som hjælper maskinerne med at lære og beregne endnu hurtigere. Over de næste fire år vil Google og adskillige af deres konkurrenter toptune TPU’erne, så det bliver økonomisk og energimæssigt forsvarligt, at den førerløse bil forstår en fodbold, der triller ud på vejen og reagerer korrekt, mens den holder øje med barnet, som måske – måske ikke – løber ud efter sit legetøj.
De førerløse biler skal bruge mindre energi på deres opgaver
Et effektivt computersystem for førerløse biler koster i dag ca. 2-3 kW at holde kørende, hver time den er på gaden. Herudover kommer så den energi, som selve bilen bruger på at dreje hjulene rundt. Til sammenligning skal du vide, at det koster 1 kW i 5-6 minutter at koge en liter vand i din elkedel.
Når den førerløse bil skal deles og køre rundt for sig selv i 16 timer om dagen, koster det ca. 50 kWh eller ca. halvdelen af det største Tesla batteri. Til sammenligning skal du vide, at det koster 0,083 kW at koge en liter vand i din elkedel. Bilen bruger dermed enorm meget energi på konstant at se på billeder af alt og alle og tage stilling til, hvordan bilen skal reagere.
Når al den energi er brugt på at kigge fotoalbum, så er der faktisk ikke ret meget strøm tilbage til rent faktisk at køre passagerer rundt i gaderne med. Opfattelsen af omgivelserne æder det hele. Men udviklingen inden for TPU’er sker så hastigt, at selvom algoritmerne kræver mere og mere regnekraft, så forestiller eksperterne sig, at problemet er løst allerede om 3-4 års tid. Der skal sandsynligvis nok også endnu en generation af computerchips til, før det for alvor kan betale sig at køre førerløst.
De førerløse biler skal have bedre og billigere sensorer
For at robotbilerne kan kigge billeder hurtigere og billigere og mere energieffektivt, skal øjnene skiftes ud.
Vi har alle oplevet, hvordan digitale kameraer er blevet fremragende med et tigerspring over de sidste 15 år. Den samme udvikling sker nu for radarer såvel som for lidarerne, der indsamler store mængder af afstandsmålinger med høj præcision. Lidaren er fremragende til at måle afstanden til ting omkring sig, så længe vejret ikke er helt forfærdeligt.
Sne er lidarens værste fjende.
Sådan så en 16-kanals lidar en gade for fire år siden:
Sådan ser en 64-kanals lidar verden i dag:
Radaren er derimod skabt til at spore og måle afstand til objekter, der bevæger sig omkring bilen uanset vejret. Hvis du hører en bip-bip-bip lyd fra din bil i dårligt vejr, så er det ultralyd-sensoren til parkering, som bliver forvirret. Det er ikke en lidar eller radar.
Lidaren og radaren er begge omkring fem år inde i samme kvantespring, som kameraerne tog. Så du skal forestille dig, at du går fra klaptelefon til nutidens smartphone på et par år. Opløsningen bliver konstant bedre, og de koster og fylder mindre.
Over de næste fire år vil kameraer, lidarer og radarer blive usynlige på bilen i takt med, at de bliver mindre og meget mere effektive end i dag. De førerløse biler skal være smukke som en iPhone, hvis man skal have menneskene over i dem
Det gør dem selvfølgelig også billigere, så bilen kan blive mere attraktiv for almindelige mennesker. En 16-kanals Lidar kostede for fire år siden 120.000 kroner for en udviklings prototype. En 64-kanals Lidar kan i dag købes for under 75.000 kroner stykket.
Snart kan lidarer produceres for under 7.000 kroner stykket, fordi der skal bruges så mange af dem. Radaren har faktisk været billig at producere i mange år og samtidig nem at gemme bag bilens paneler. Trenden er dog nu, at de vokser sig lidt større for at opnå endnu bedre performance. Over de næste fire år vil kameraer, lidarer og radarer blive usynlige på bilen i takt med, at de bliver mindre og meget mere effektive end i dag. De førerløse biler skal være smukke som en iPhone, hvis man skal have menneskene over i dem.
Førerløse biler skal være sikrere end førerbiler
Historisk set har vi opbygget vores sikkerhedssystemer rundt om chaufføren. Føreren har taget kørekort og læst loven. Hvis alle bare fulgte loven, var opmærksomme og kiggede sig over skulderen, før man overhalede, så ville der aldrig ske ulykker i trafikken.
Alle avancerede autopiloter, cruisecontrol systemer og Automated Driver Assistance Systems (ADAS) er bygget efter samme logik: Hvis systemet er i tvivl, så gør chaufføren opmærksom på problemet, for det er førerens ansvar. Hvis radaren eller kameraet ikke er helt sikker på, om bilen bør bremse, så lad være. Giv i stedet chaufføren et hint og lad hende tage ansvaret. I bil-industrien er denne fremgangsmåde kendt som ”Safety case based on omission”. Altså at sikkerheden er baseret på undladelse. For selv om teknologien har ret i 99 procent af tilfældene, så er der stadig den sidste ene procent tilbage. Derfor har moderne bilers sikkerhedsteknologi fralagt sig ansvaret. Indtil nu.
Der er endnu ikke skabt konsensus omkring, hvordan selvkørende biler kan vurderes sikre. Men at køre 1 milliard km uden uheld bliver svært. Derfor skal der nye metoder i brug. Simulering er én af dem, men er langt fra nok
Nu er der ingen chauffør at give skylden længere, sådan som Tesla og Uber har gjort et par gange efterhånden. Det store paradigmeskifte gør, at den førerløse bil uendelig mere svær at bygge. Det er producentens ansvar, at der ikke sker ulykker. Før var 99 procent godt nok.
Nu er de tvunget til statistisk at bevise, at bilen er sikker 99,99 procent af tiden. Ellers må de ikke komme ud på vejen blandt de andre bilister.
Problemet er bare, at bilen skal tilbagelægge 1 milliard kilometer, før det kan bevises, at den virker, som den skal. Google’s Waymo har kørt længst med sine otte millioner kilometer. Men der er selvsagt mange timers kørsel på øde landeveje endnu, før den har bevist sit værd. Derfor investerer selskaberne nu rigtig mange penge i meget avancerede simuleringer, for at teste hvordan bilens systemer opfører sig i uventede situationer.
Der er endnu ikke skabt konsensus omkring, hvordan selvkørende biler kan vurderes sikre. Men at køre 1 milliard km uden uheld bliver svært. Derfor skal der nye metoder i brug. Simulering er én af dem, men er langt fra nok. De lovgivende myndigheder i USA forventes at offentligøre deres forslag senere i år.
Infrastrukturen skal forbedres til den førerløse bil
Med bilerne blev brostenene skiftet ud med asfalt. Nye teknologier, der ændrer samfundet til det bedre, kræver store infrastruktur-ændringer. Vejskilte til bilerne, kabler til internettet, telefonmaster til telefonerne. Tydelighed til de førerløse biler. Det er Søren Halskov Nissen’s opfattelse, at der skal ny infrastruktur til for at udskifte de gamle biler med førerløse biler. Det hele skal bygges op. Så robotterne giver os ikke mindre arbejde. Der er masser, som skal bygges om.
I højtrafikerede områder skal der, som i London, sættes fodgængerbarrierer op ved lyskryds og andre steder, hvor fodgængere kunne fristes til at smutte over gaden og blive kørt over af en førerløs bil. Når infrastrukturen er på plads går der ikke mange år, før førerløse biler går fra at være i undertal, til at de overtager vejene
Det er ikke nok, at der politisk skal dannes konsensus om lovgivningen, eller hvordan sikkerheden skal defineres. Byerne skal også investere i ny infrastruktur, der hjælper sikkerheden på vej. Hvis et land eller by vil være førende på området, skal de i gang med at planlægge lige nu. Der ligger store potentielle besparelser ude i fremtiden for den kollektive trafik.
Der skal være flere dedikerede og meget tydeligt markerede busbaner, der på sigt kan deles med førerløse biler. Flere dedikerede busbaner vil på kort sigt skubbe nogle biler ud af byen og folk over i offentlig transport, samtidig med at busbanerne på sigt gør arbejdet meget lettere for førerløse biler.
Vejene bør markeres med skilte for hver 25 meter, der er specielt designede til at være ekstra synlige for lidarer og radarer under alle vejrforhold. For banemarkeringer forsvinder i snevejr. Byerne bør føre et nøje kartotek over den præcise position af disse skilte, og hvad afstanden til centrum af vejbanerne er ud fra skiltet.
Alle lyskryds skal udstyres med V2X systemer, som fungerer over en slags Wifi til moderne biler. Mennesker ser nemt, at der er rødt lys, eller hvis tur det er til at kører frem, men det er ikke altid lige så nemt for computerne.
I højtrafikerede områder skal der, som i London, sættes fodgængerbarrierer op ved lyskryds og andre steder, hvor fodgængere kunne fristes til at smutte over gaden og blive kørt over af en førerløs bil. Når infrastrukturen er på plads går der ikke mange år, før førerløse biler går fra at være i undertal, til at de overtager vejene.
Der kører førerløse biler rundt i Danmark om fem år
Computer-ingeniørerne skal nok få den førerløse bil gjort klar til masserne om 3-5 år. Spørgsmålet er bare, om de når det, inden der sker en fatal ulykke på vejen mod målet. Ulykker af den slags, som skaber overskrifter og chokbølger hele pressen rundt. Som bekymrede politikere ikke kan sidde overhørig. Så teknologien ikke længere får lov til at udføre sine førerløse eksperimenter med halvfærdige og tonstunge maskiner blandt bløde mennesker på vej til og fra arbejde.
Vi får mindre forurening, og mennesker kan slappe af og sove i stedet for at dreje på rat og trykke klamper i bund. Det er kort sagt lige så smart at udskifte bilerne, som dengang vi udskiftede hestene. Og ingen savner hestene på vejene i dag
Trafikken handler først og fremmest om sikkerhed. Men her står vi ikke lige nu. Det største problem er, at vi ikke vil have førerløse biler, fordi rigtig mange mennesker elsker at køre bil. Men vi bliver nødt til at have dem for at opnå total trafiksikkerhed. Vi kan få mere effektivitet og fjerne motorvejskøer og spare tid og dermed penge.
Vi kan flytte ting og udnytte klodens ressourcer bedre og dermed give plads til de to en halv milliard forbrugere, der er på vej ind fra fattigdom til middelklasse. Sådan at vi ikke udnytter kloden 2,5 gange så meget, som vi gør lige nu. Vi får mindre forurening, og mennesker kan slappe af og sove i stedet for at dreje på rat og trykke klamper i bund. Det er kort sagt lige så smart at udskifte bilerne, som dengang vi udskiftede hestene. Og ingen savner hestene på vejene i dag.
Folk skal også lære at deles om bilerne. De skal ikke have hver sin. Til gengæld forvandler bilerne sig over årene fra at ligne biler til at blive rum. De store, hvor man kan bo og arbejde, og de små, som kun kan fragte en pizza. Det giver plads til så mange flere gående mennesker, når byerne ikke længere primært består af brede veje og parkeringspladser. Så forsvinder parkeringsbøden som telefonboksen. Så forsvinder bilforsikringen og færdselsbetjenten, samtidig med at helt nye jobs bliver skabt.
Ingen af bilopfinderne forudså forstædernes komme, da hesten forsvandt. Ingen opfindere af førerløse biler kan forestille sig, hvordan denne førerløse verden vil ændre vores liv. På samme måde som internettet blev mere end deling af dokumenter. Den førerløse bil er parat til at overtage vores liv om et øjeblik. Det begynder med, at den skal redde liv i trafikken. Herefter vil vi opdage, at den har en helt ny verden med i bagagerummet. Så vi kan leve på en helt ny måde.
Topfoto: Casey Allen on Unsplash
Foto af Roskildevej anno 1921: Rødovre kommunes lokalhistoriske samling
Foto af banankage: Michael Parzuchowski on Unsplash
Tak til Jesper Wille og Søren Halskov Nissen for at bruge deres tid på at gøre mig klogere.
Modtag POV Weekend, følg os på Facebook – eller bliv medlem!
Hold dig opdateret med ugens væsentligste analyser, anmeldelser og essays i POV Weekend – hver fredag morgen.
Det er gratis, og du kan tilmelde dig her ![]()
POV er et åbent og uafhængigt dansk non-profit medie.
Har du mulighed for at bidrage til vores arbejde? Bliv medlem her ![]()





